Educational Material
1.4 High-Performance Gyroscopes
In guidance, navigation, and control (GNC) systems there is a sometimes need for high-performance or high-end gyroscopes. Such gyros provide unique capabilities in unaided navigation performance and heading determination through gyrocompassing that are impossible with today's MEMS gyro technology. The most prevalent of such high-end gyroscopes are optical gyros, used in applications with the most stringent performance requirements.
Optical Gyroscopes
Optical gyros rely on the Sagnac effect to measure angular rate. Because there are no mechanical moving parts, they generally lack sensitivity to vibration. There are primarily two types of optical gyroscopes: Ring Laser Gyros (RLGs) and Fiber Optic Gyros (FOGs).
Sagnac Effect
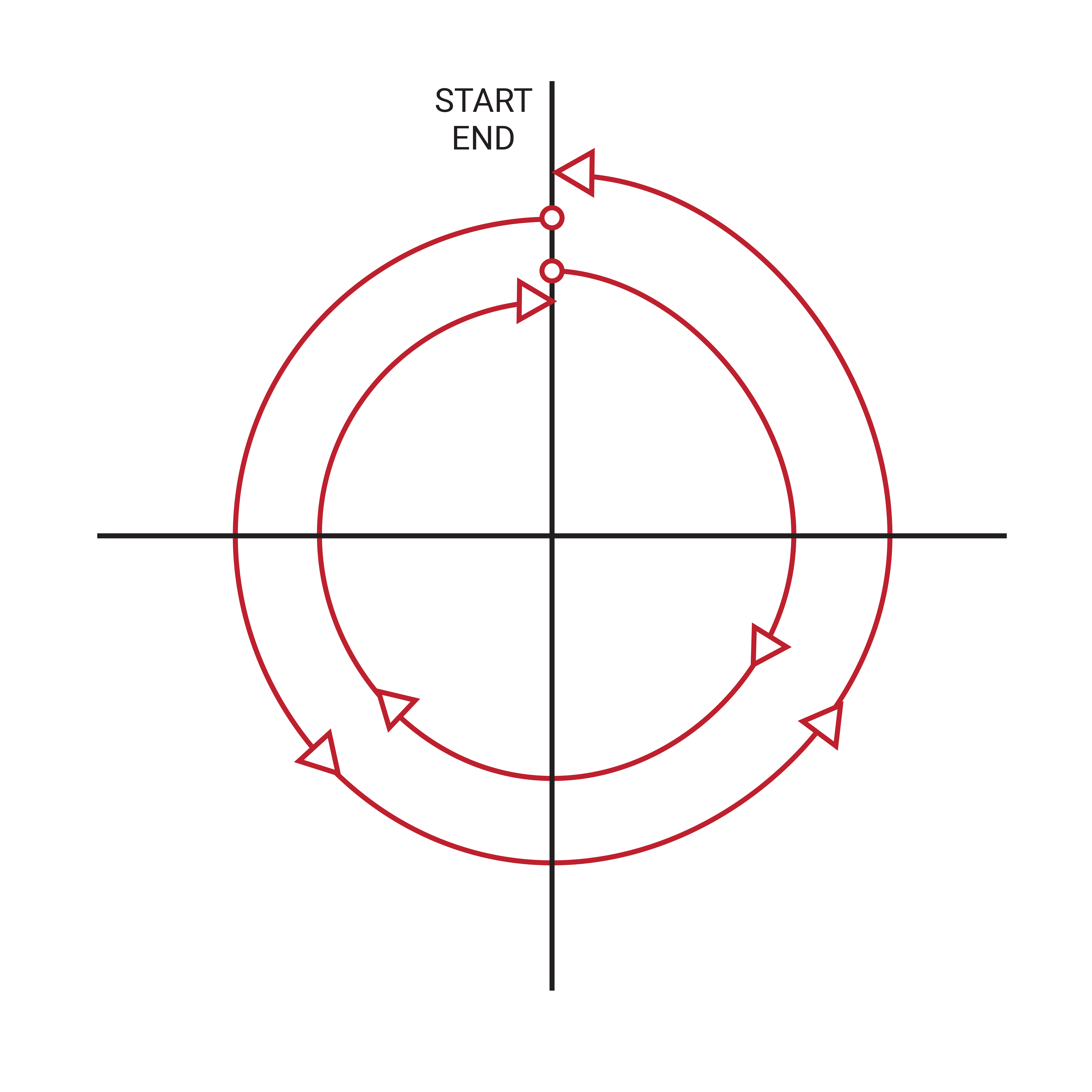
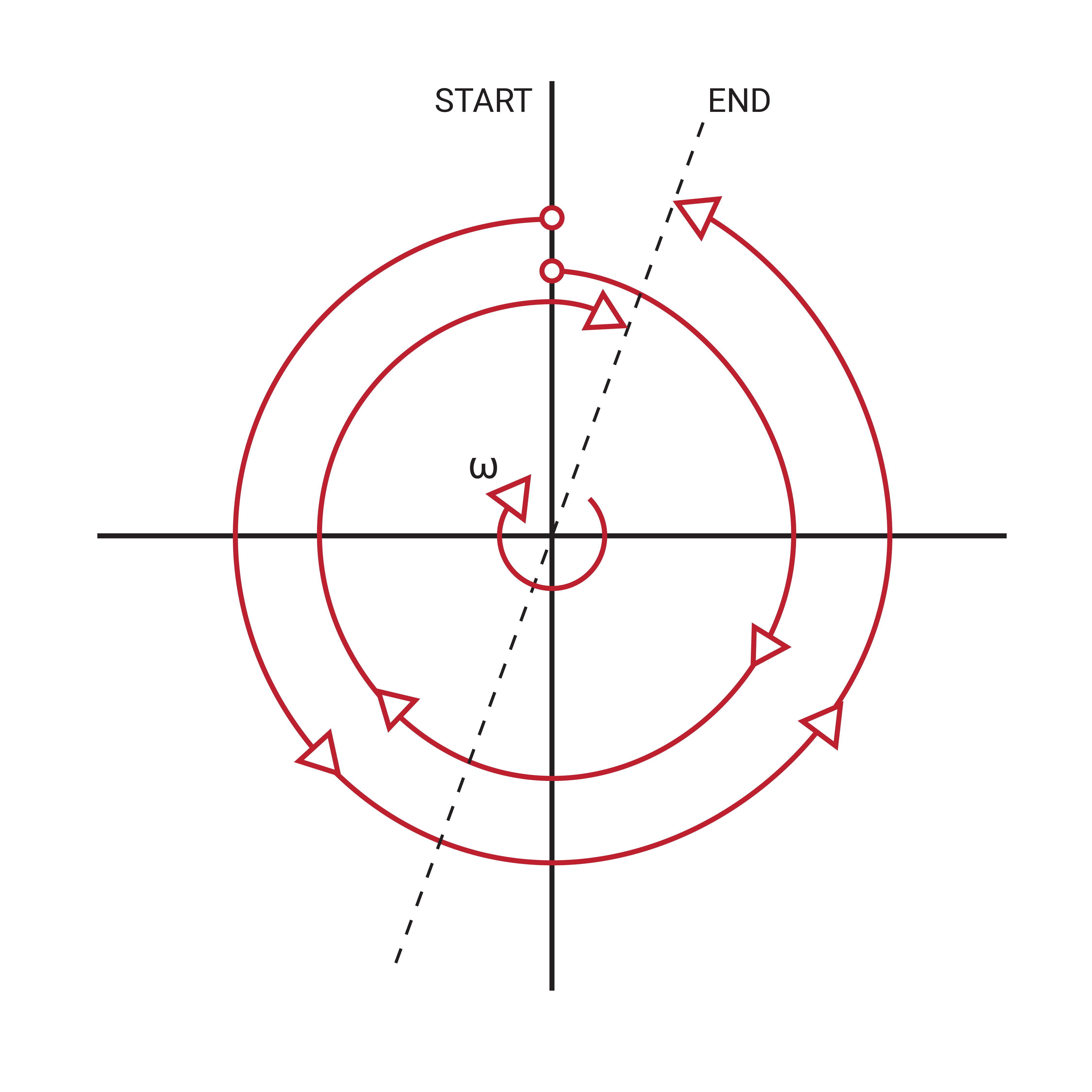
Optical gyroscopes use beams of light travelling in opposite directions around a closed-loop ring to measure a system's angular rate. Obviously, those two light beams travel exactly the same distance in a non-rotating system, as seen in Figure 1.9a. But since light travels at a constant speed relative to an inertial frame of reference, if a system is subjected to an angular rate, one light beam travels a longer distance than the other, as observed in Figure 1.9b. When the two beams are brought together again, this gives rise to interference dependent on the amount of rotation---a phenomenon known as the Sagnac effect.
Ring Laser Gyroscope
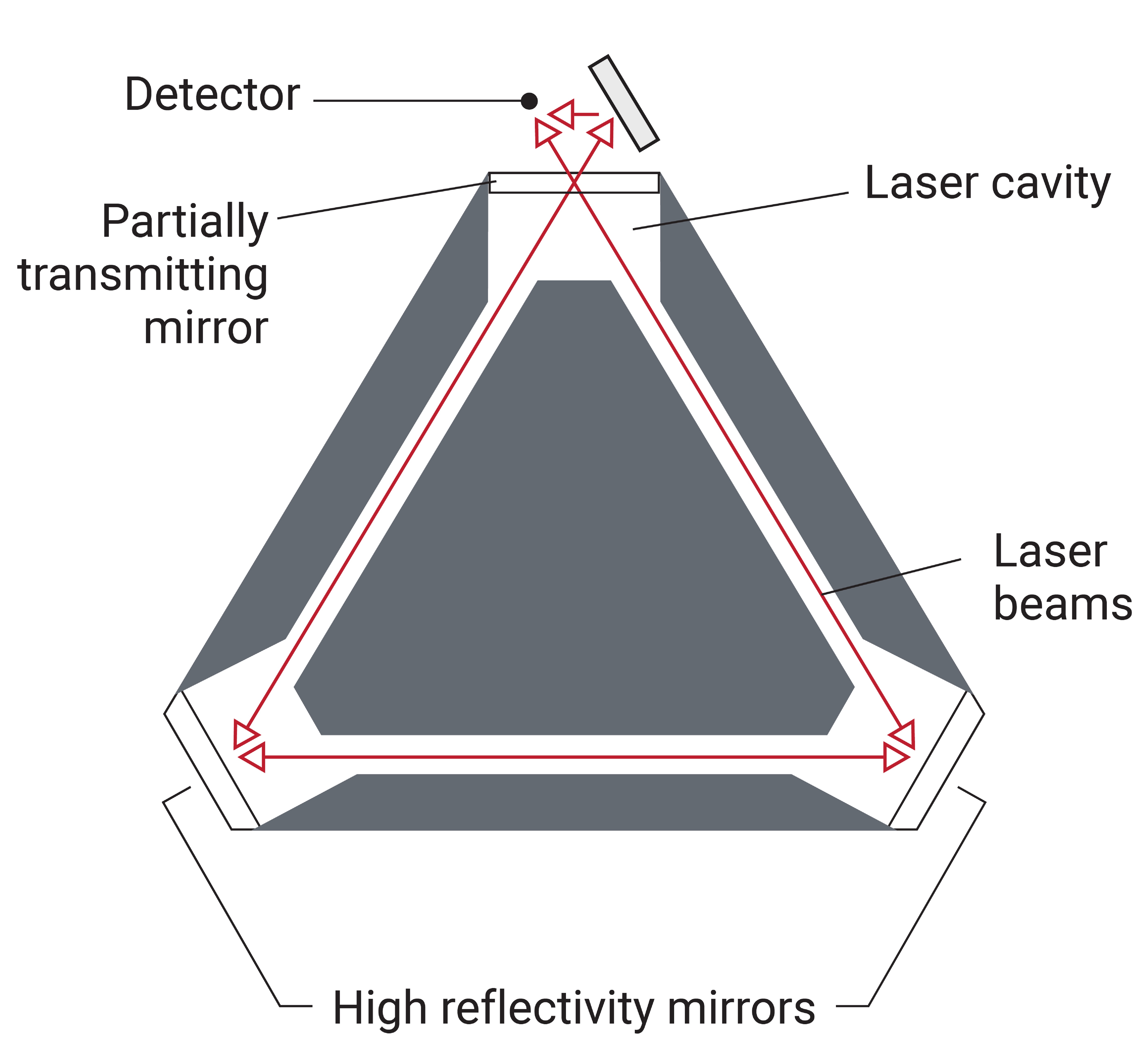
A ring laser gyroscope (RLG) is a high-performance optical gyroscope that uses the Sagnac effect to detect rotation. As seen in Figure 1.10a, an RLG utilizes a closed-loop laser cavity, typically filled with helium-neon gas, to perform its measurements. The laser itself is integrated within the chamber, making the externally observed interference pattern directly proportional to the rotation angle. These gyroscopes are the highest-performance available, which combined their complexity, makes them the most expensive as well.
Fiber-Optic Gyroscope
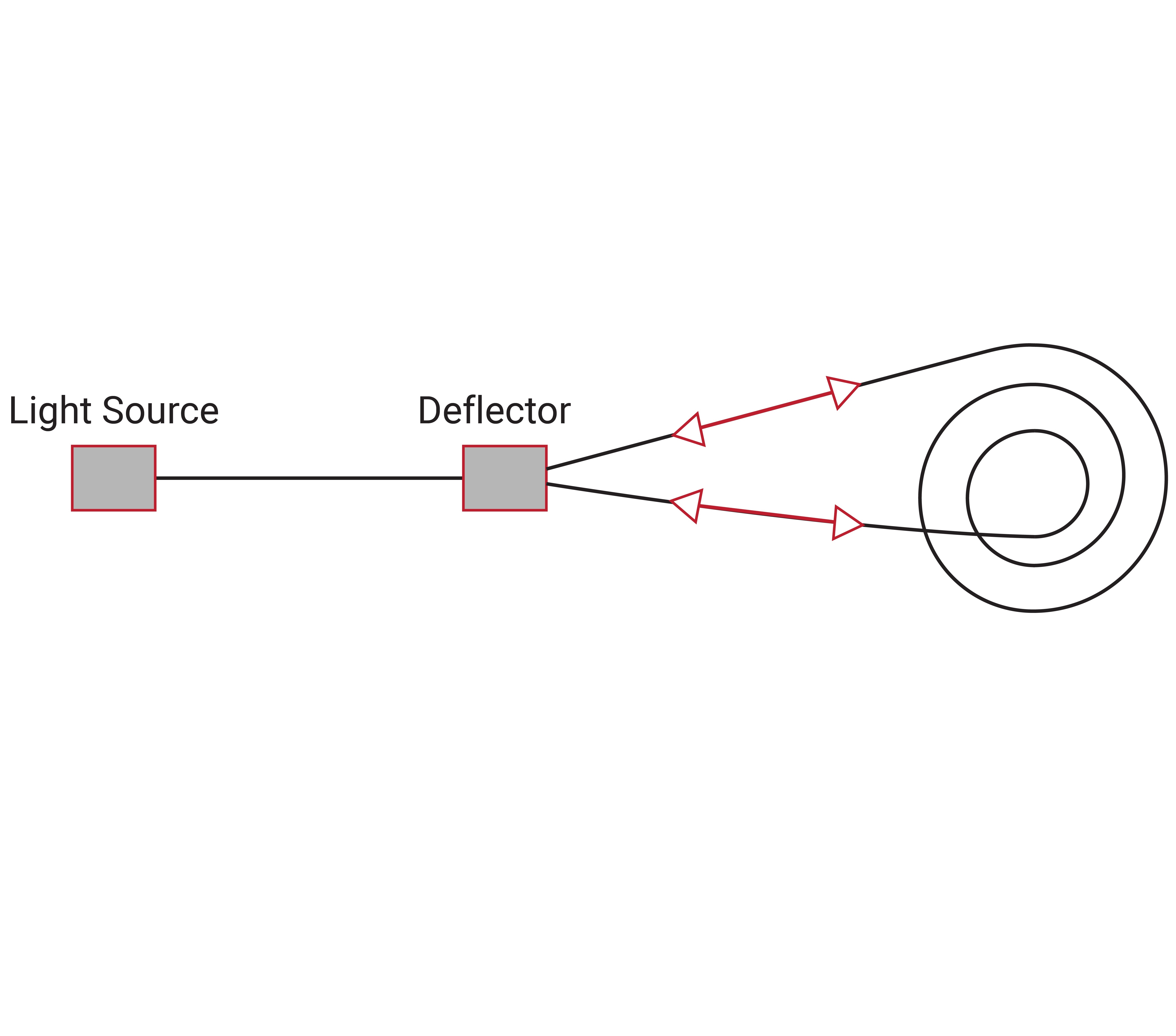
A fiber-optic gyroscope (FOG) is a high-performance optical gyroscope that also implements the Sagnac effect in its calculations to detect rotation. The FOG uses a laser source, beam splitters, a detector, and fiber-optic coil as shown in Figure 1.10b. It utilizes a light source that splits into two wavelengths that travels through the optical fiber in opposite directions. Once the beams reach the detector, it can determine the rotation rate through the Sagnac effect. The sensitivity and performance of a FOG can vary depending on the coil diameter and number of turns it has, with performance directly correlated to the length of the fiber (some use >1 km of fiber in the coil). Fiber-optic gyros are a more recent technology than RLGs and take advantage of existing, lower-cost technologies, yielding much better pricing, though at somewhat reduced performance relative to the RLG.
Gyrocompassing
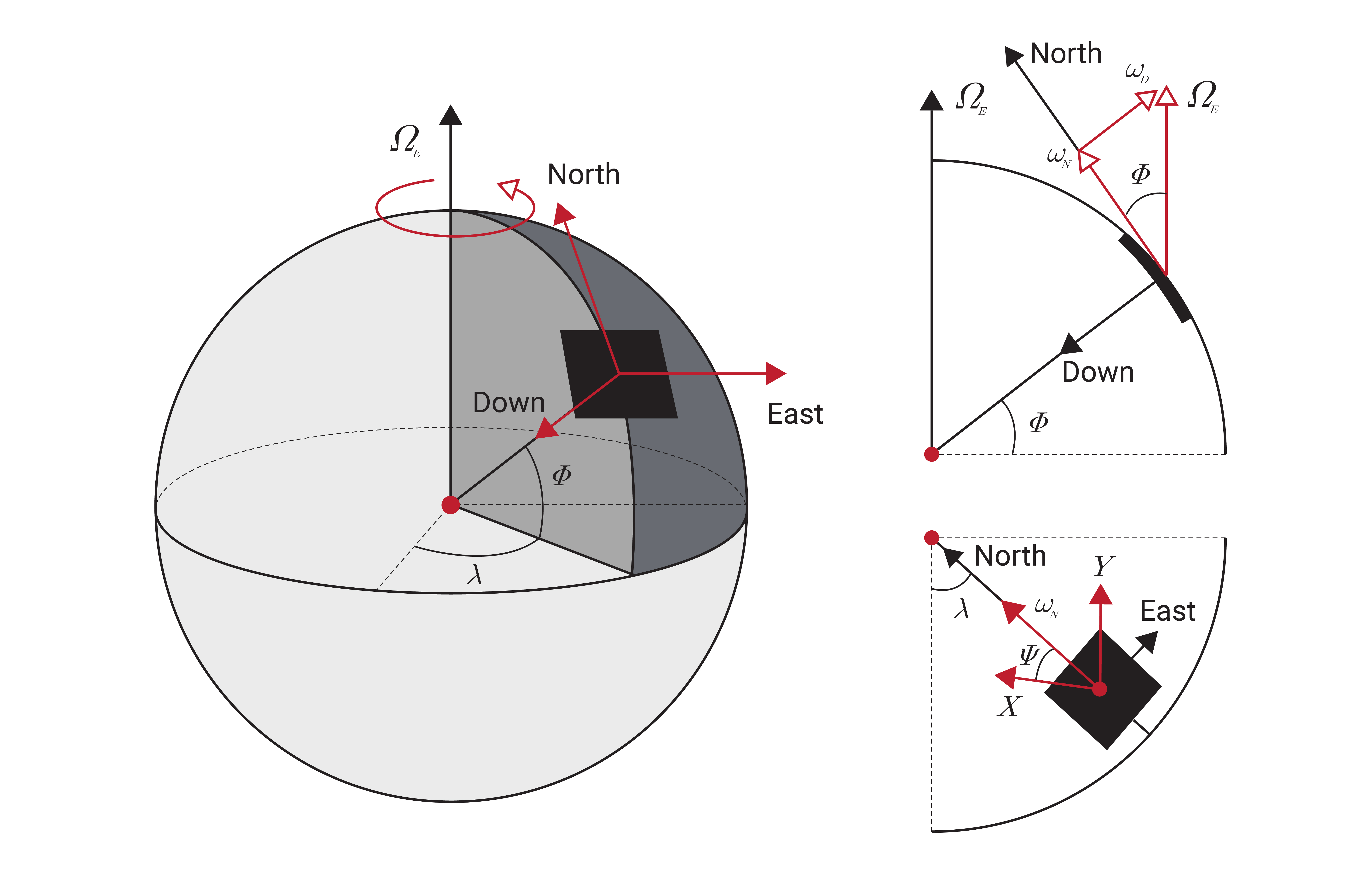
Gyrocompassing is the ability of a high-performance gyroscope to determine heading without external aiding. A gyrocompass detects True North by directly measuring Earth's angular rate as it spins on its axis, seen in Figure 1.11. Using an accelerometer to measure the direction of gravity, Earth's angular rate ($\Omega_{_E}$) can be decomposed into horizontal ($\omega_{_N}$) and vertical ($\omega_{_D}$) components, with the horizontal component pointing due North. The direction of that horizontal component with respect to the sensor axes provides the heading ($\psi$).
Achieving accurate heading via gyrocompassing requires a particularly low-noise sensor with superior bias stability. The Earth rotates at approximately 15°/h, with the horizontal component equal to that times the cosine of latitude ($\Phi$). At a 45° latitude, an error as small as 0.1°/h in the angular rate measurement results in a 0.5° heading error. The size, weight, power, and cost (SWAP-C) of gyros capable of gyrocompassing is often prohibitive, but it remains the single most reliable method of heading determination, entirely self-contained to the inertial sensors.
Unaided Inertial Navigation
In addition to gyrocompassing, the main advantage of high-end gyroscopes is their performance in unaided inertial navigation, also known as dead-reckoning. As described in Section 3.3, the performance of the gyro typically dominates the position errors when performing a pure integration of inertial sensors. While they obviously provide improved navigation performance in aided situations (eg. GNSS-aided), the improvement in performance relative to price is not usually warranted.
