Educational Material
1.2 Global Navigation Satellite System (GNSS)
A Global Navigation Satellite System (GNSS) is a satellite configuration, or constellation, that provides coded satellite signals which are processed by a GNSS receiver to calculate position, velocity, and time. GNSS is a passive system, meaning that there is no limit to the number of users allowed to utilize its technology, making it available for anyone to use around the world.
In 1978, the first satellite for a navigation system was launched by the United States. This led to a fully operational constellation of 24 satellites known as the NAVSTAR Global Positioning System in the early 1990s. Today this system is known simply as the Global Positioning System, or GPS, and contains 31 satellites in its constellation.
Constellations
Since the U.S. launched the first operational global navigation satellite system, several other nations have launched similar GNSS constellations. Some of these systems are currently available for use while others will be fully operational in the coming years, as shown in Table 1.4.
| NAME | COUNTRY OF ORIGIN | FULLY OPERATIONAL | NUMBER OF SATELLITES | CARRIER FREQUENCIES |
|---|---|---|---|---|
| GPS | USA | 1993 | 31 | L1/L2/L5 |
| GLONASS | Russia | 1995 | 24+ | G1/G2 |
| Galileo | Europe | 2020 | 30 (22 current) | E1/E5a/E5b |
| BeiDou | China | 2020 | 30 (28 current) | B1/B2 |
| QZSS | Japan | 2024 | 7 (4 current) | L1/L2/L5 |
Segments
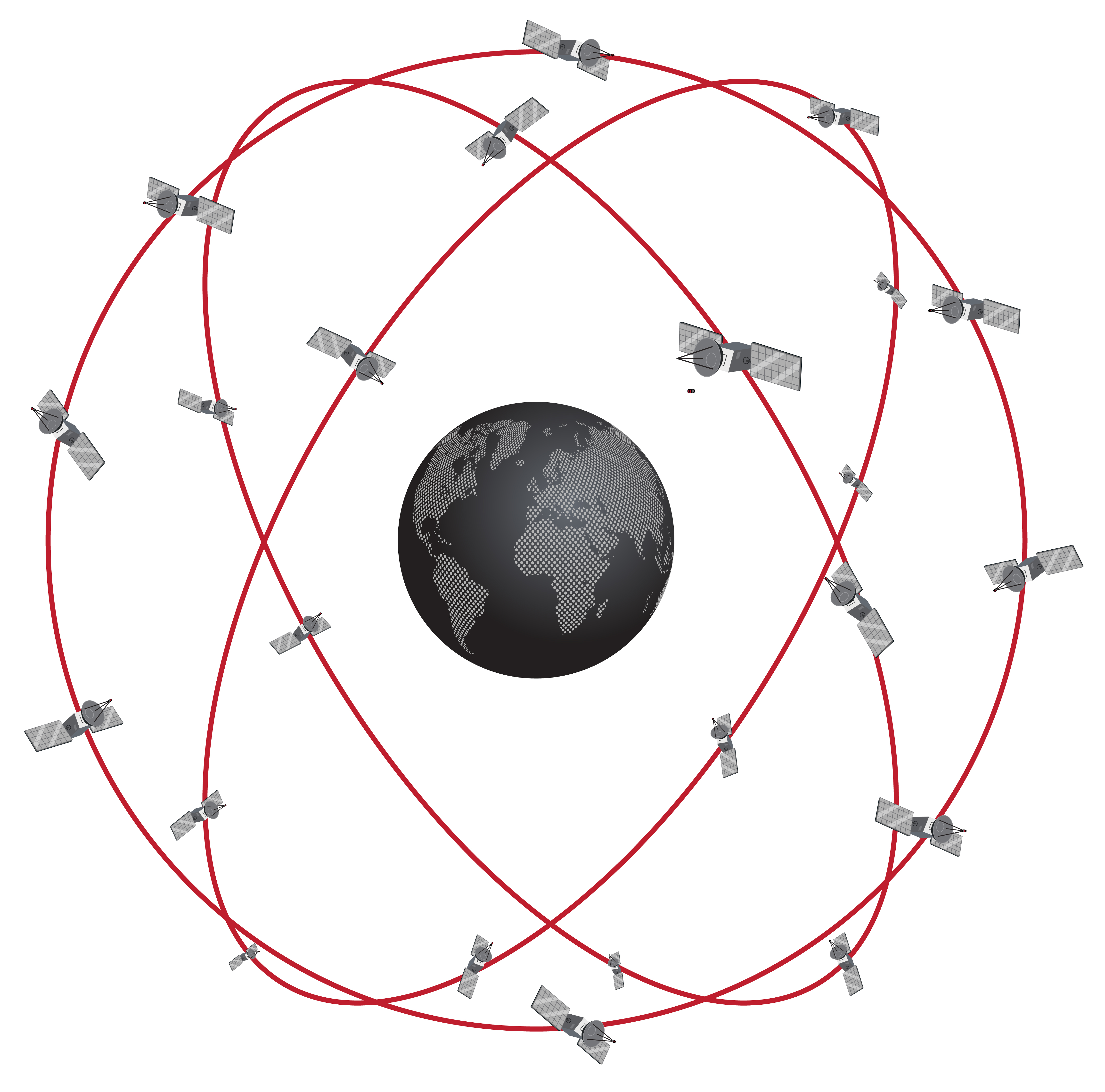
GNSS operates through three different segments known as the Space Segment, the Ground Control Segment, and the User Segment, as shown in Figure 1.3a. The Space Segment consists of the satellites themselves placed into a specific constellation, as seen in Figure 1.3b. The Ground Control Segment utilizes Earth-based tracking stations around the world to manage the entire navigation system. Specific locations of these stations for the U.S.-based system, GPS, are shown in Figure 1.4. The User Segment is comprised of the GNSS receivers that can be used anywhere around the world.
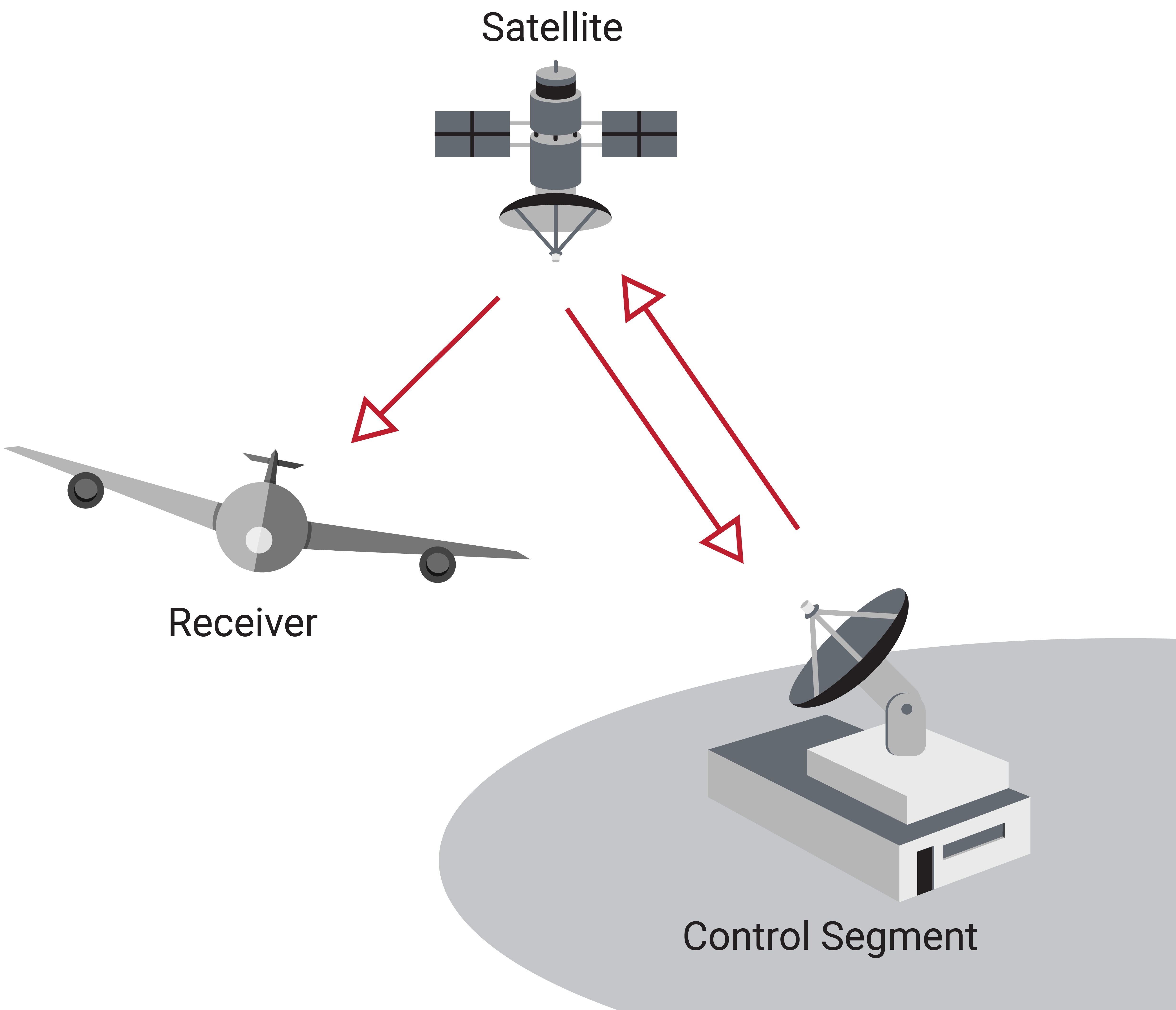
The Ground Control Segment tracks and monitors errors and biases in the satellite's orbit, clock, and health. This information is sent through radio signals up to the Space Segment. It is through this process of the Ground Control Segment tracking the orbits of the Space Segment and uploading orbit corrections to them that the satellites are able to know to a high precision where they are located. The satellites then transmit that information back down to the User Segment where they are tracked, decoded, and utilized in determining a user's position, velocity, and time.

Navigation Message
The signals that the Ground Control Segment sends to the satellites which then get sent to the end user are known as the navigation message. The GPS navigation message contains four main parts: GPS time, satellite health, ephemeris, and the almanac. While this discussion is specific to the GPS constellation, the basic features exist across all GNSS constellations.
GPS Time
The GPS time in the navigation message is based on an atomic clock that is able to keep time to a high degree of accuracy. It is specified in terms of the week number and the seconds of the week. The week number is a counter that designates the number of weeks that have passed since January 6, 1980, or Week 0. However, this counter can only store values from 0 to 1,023, so once Week 1,024 was reached on August 21,1999 and then again on April 6, 2019, the week number was rolled back to 0. This rollover cycle of the week number will continue to repeat every 1,024 weeks. The seconds of the week is the number of seconds into the current week, starting Sunday at 12:00 A.M. GMT.
Satellite Health
The satellite health information conveys to a GPS receiver whether the satellite is healthy and the navigation data it is transmitting can be trusted. If a satellite is deemed to be "healthy", the navigation data transmitted by the satellite is considered usable. However, a satellite that is considered "unhealthy" contains navigation data that is either partially or fully unusable.
Ephemeris
The ephemeris contains high-accuracy orbit data specific to the satellite that is transmitting the navigation message. This data is only considered useable for up to four hours from the time it was uploaded to the satellites by the Ground Control Segment. Therefore, the ephemeris is updated for each of the satellites every four hours by the Ground Control Segment. Fortunately, downloading the full ephemeris from a satellite only takes a GPS receiver approximately thirty seconds.
Almanac
The almanac is a collection of low-accuracy ephemerides for every satellite in the Space Segment constellation. This library of data is updated much less frequently than the ephemeris and takes a GPS receiver about 12.5 minutes to download. Since the almanac contains low accuracy ephemerides, receivers use this information mainly for determining which satellites will soon be visible on the horizon to track. The almanac also contains leap second information which is needed to convert GPS time to Coordinated Universal Time (UTC), as UTC lags GPS time by the number of leap seconds.
Pseudorange, Carrier Phase, Doppler
There are three raw observables that a GNSS receiver tracks: pseudorange, carrier phase, and Doppler.
Pseudorange
In order to determine the range from the satellite to the user, a GNSS receiver measures the time required for a signal to travel from a satellite down to the receiver. Since the signal is traveling at the speed of light, the product of the signal time of travel measured by the receiver ($t$) and the speed of light ($c$) equals the range ($r=t\cdot c$).
This measurement, however, relies on high-accuracy timing. Receivers use low-end clocks for timing, not atomic clocks, resulting in an unknown bias from the true GPS time. Due to this clock bias error, receivers are not measuring the true range to the satellite, but rather a pseudorange ($\rho$). The pseudorange is the basis for calculating a user's position and time.
Carrier Phase
A signal transmitted from a satellite contains a sinusoidal signal called the carrier wave. While the signal contains no information itself, it carries other signals containing information that have been modulated on top of it. The distance from a satellite to a receiver can be broken into an integer number of full wavelengths of the carrier signal plus a fractional wavelength. This fractional wavelength is known as the carrier phase and can be directly measured. Though a standalone receiver cannot estimate the integer number of wavelengths, the carrier phase can be used in a multi-receiver technique, known as RTK (see Section 1.5), to enable high-precision positioning.
Doppler
As a GNSS receiver is receiving and tracking a signal from a satellite, the frequency of the signal appears to shift due to the combined motion of the user and of the satellite orbiting around the Earth. This shift in frequency can be used to determine a relative speed. Multiple Doppler shift measurements are able to produce an actual velocity for the user.
Position, Velocity & Time (PVT)
The information from the navigation message and the data in the raw observables can be used to determine the position, velocity, and time (PVT) of a GNSS receiver.
Trilateration
While a range measures the distance between a satellite and a user, this measurement on its own does not provide a user's position. However, if range measurements to multiple satellites are able to be determined, a method known as trilateration can then be used to estimate a user's position.
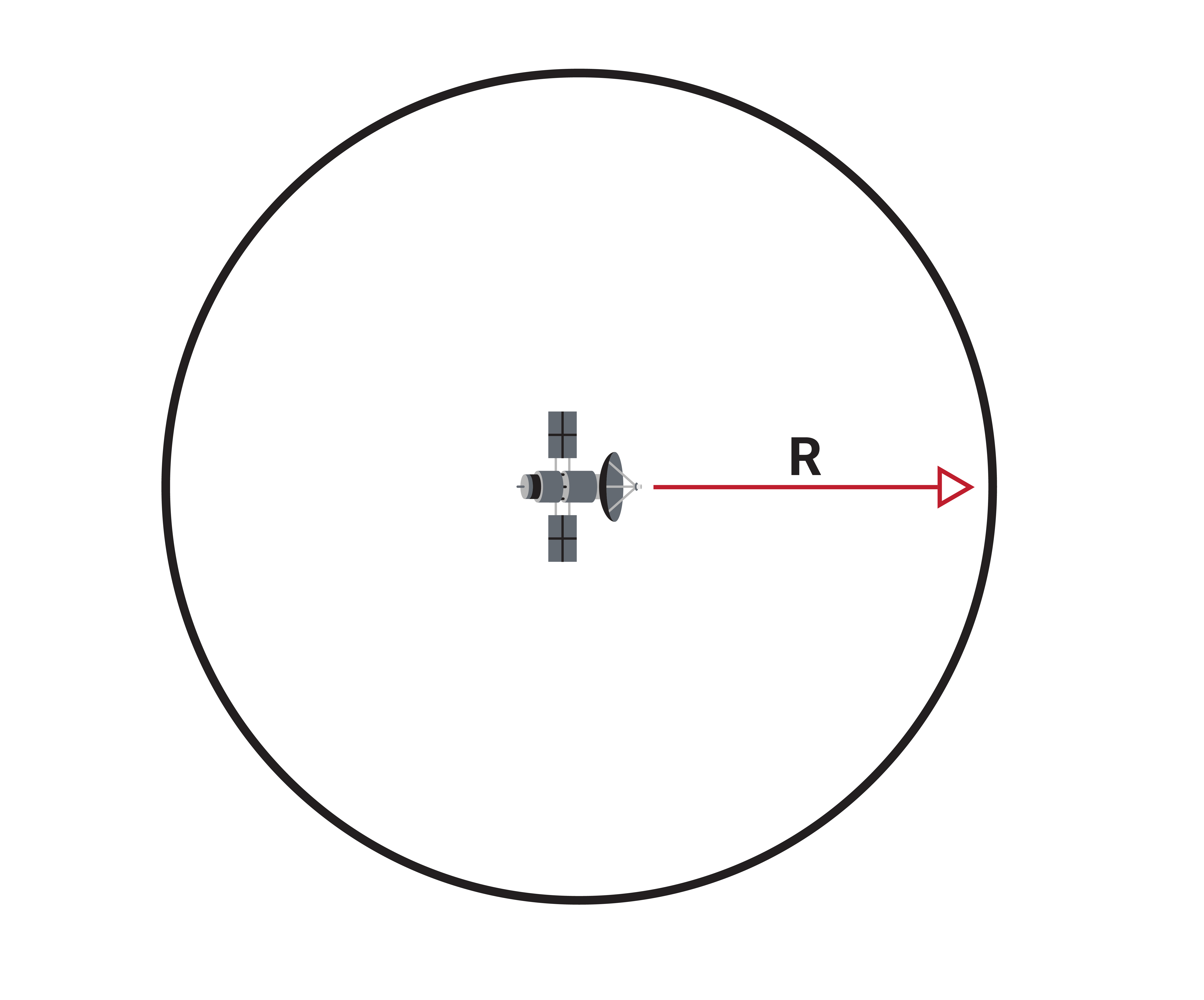
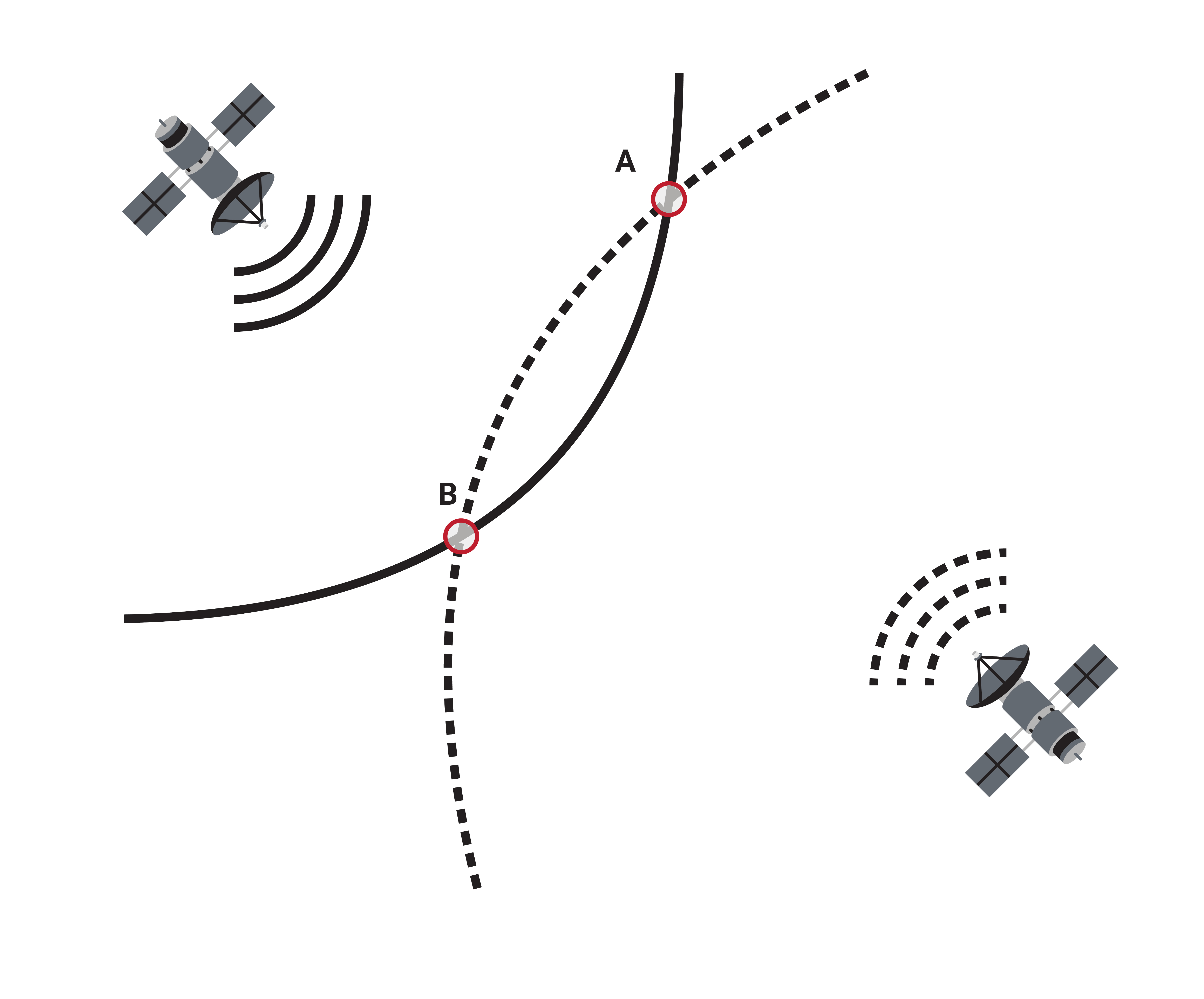
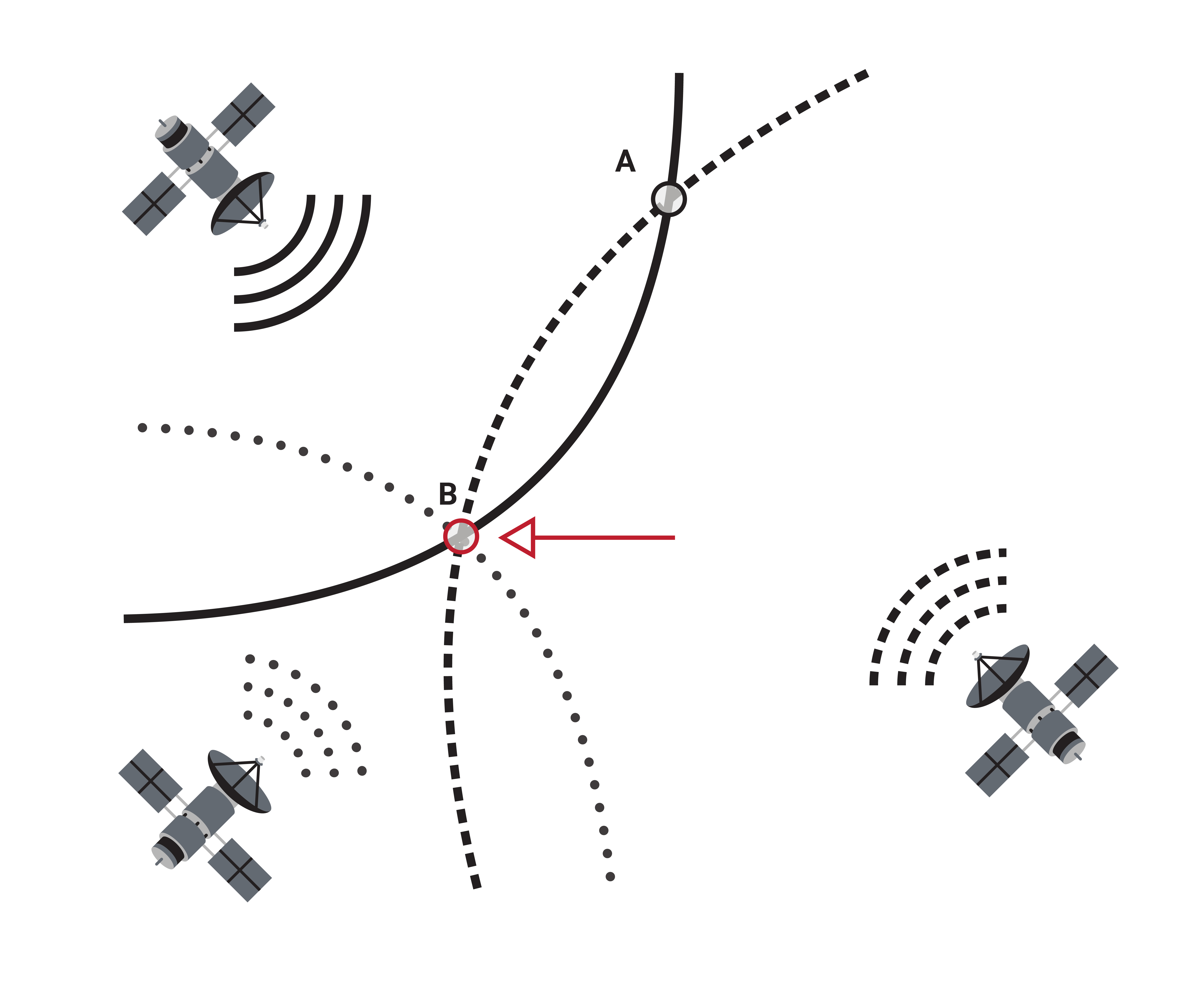
Trilateration uses a range measurement from the satellite to the user to create a region encompassing all of the possible positions of the user. In the case of 3D positioning, this possible region is a sphere of radius equal to the range measurement, centered at the location of the satellite, as seen in Figure 1.5a. Once an additional range measurement to another satellite has been determined, the possible position of the user can be reduced down to the circle where the spheres intersect, as seen in Figure 1.5b.
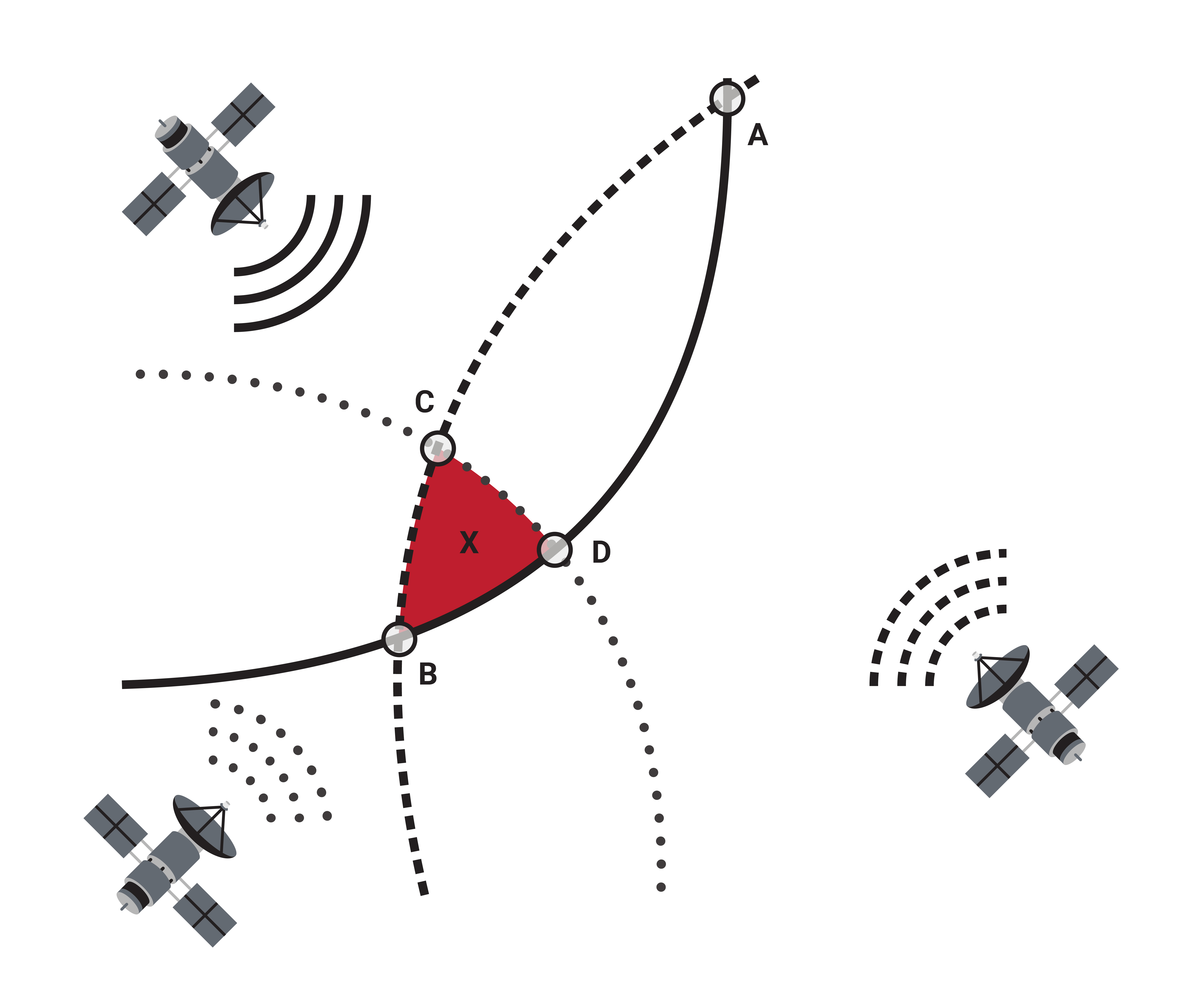
In order to determine the estimated position of the user down to a single point, a minimum of three range measurements to three different satellites must be calculated. These three range measurements provide three different spheres of possible positions the user could be and all intersect at one point, as shown in Figure 1.5c. In practice, each of those measurements is imperfect, due to a variety of errors, and an estimated position is calculated from the best fit of those measurements, as seen in Figure 1.5d.
While that is the standard definition of trilateration, in the case of GNSS, a receiver does not measure a true range to the satellite but rather a pseudorange due to the clock bias error. In fact, a fourth pseudorange measurement is needed to determine the estimated position and estimated clock bias simultaneously. Note that the delays due to the length of cable between an antenna and its receiver are also accounted for when estimating clock bias, so cable length does not impact the positioning results.
Pulse Per Second (PPS)
GNSS receivers use a lower accuracy clock that is then disciplined to GPS time using the specific timing messages in the signals sent from the satellites to the receivers. Once in sync with GPS time, the receiver can output a pulse per second signal, or PPS, on the top of every second in GPS time. Because the top of a second in GPS time is the same as the top of a second in UTC time, this output can be used in many different timing applications, with accuracy on the order of 10s of nanoseconds.
Time-to-First-Fix (TTFF)
The time-to-first-fix is the duration of time needed for a GNSS receiver to acquire signals from the satellites, perform trilateration, and obtain a position solution, sometimes referred to as a GNSS fix. This length of time depends upon how the GNSS receiver is started up. A receiver can be started using either a cold start, a warm start, or a hot start. As shown in Table 1.5, these three different types of start ups have different amounts of information available to the receiver to use in its process of acquiring a GNSS fix.
A cold start takes the longest amount of time to obtain a GNSS fix as the receiver possesses no information regarding where the satellites are located and must complete the 30-second download of ephemeris data. A warm start takes less time than a cold start because it already has valid almanac data, however, it is not much quicker, as it still must wait to obtain the ephemeris data. A hot start takes the least amount of time, typically just a few seconds, since the receiver already has valid almanac data, ephemeris data, and time.
| START-UP | STORED RECEIVER DATA | EXAMPLE |
|---|---|---|
| Cold Start | No information available | GNSS receiver is first turned on, or it has been a long time since the receiver was last turned on. |
| Warm Start | Receiver only has valid almanac data | Turning on the receiver when it has been turned off for one day. |
| Hot Start | Receiver has valid almanac data, ephemeris data, and time | Turning on the receiver when it has been turned off for less than four hours. Requires continuous backup power to maintain clocks. |
