ENABLING ADVANCED CAPABILITIES
The most demanding defense and aerospace applications require the most robust and capable navigation solutions. VectorNav’s Tactical Series is designed to provide unprecedented modularity with support for a range of external inertial and positioning technologies. Complete your objective and gain the competitive edge over emerging Navigation Warfare (NAVWAR) threats and contested environments with VectorNav.
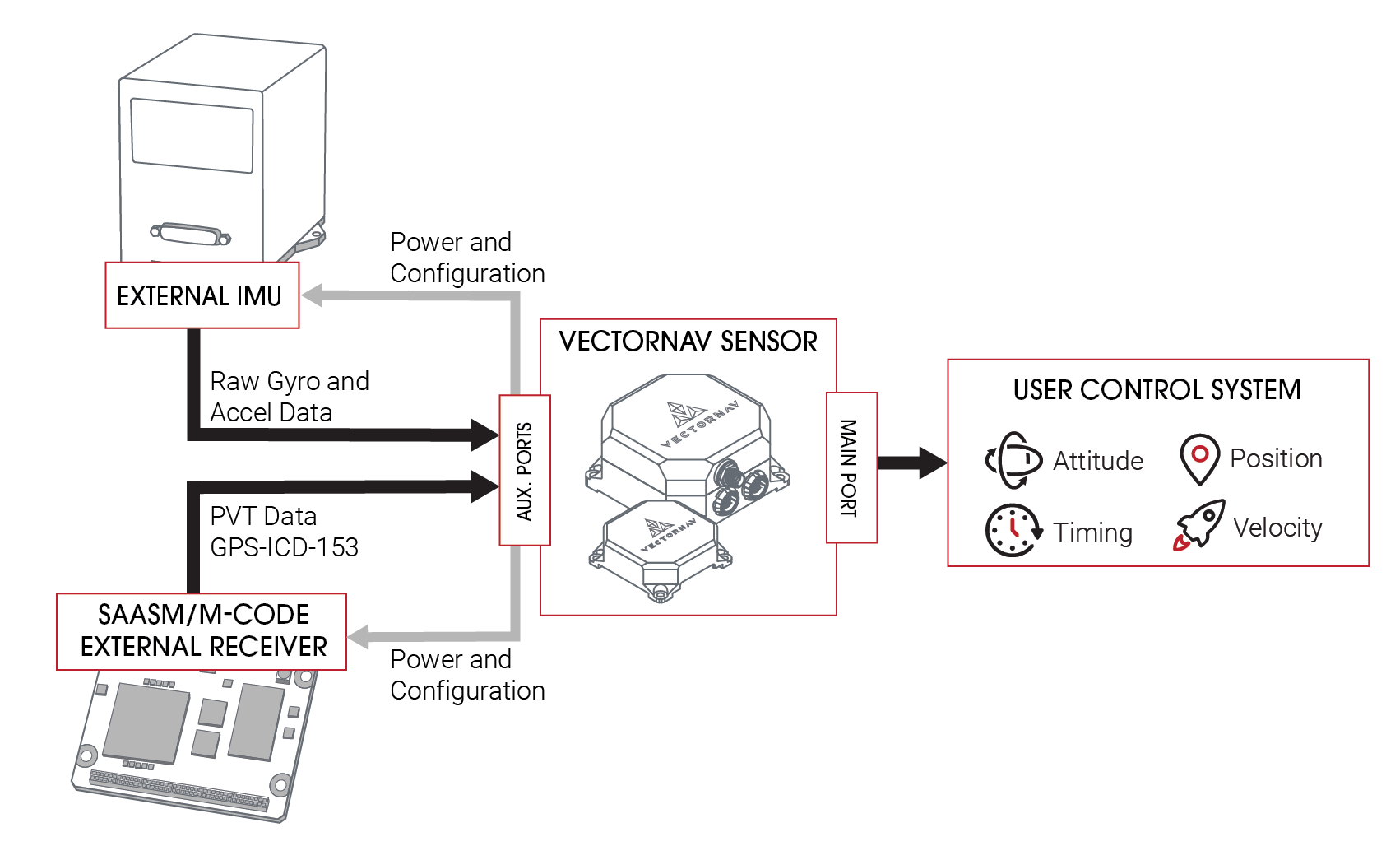
VectorNav’s Tactical Series features auxiliary ports to connect to external Inertial Measurement Units and SAASM or M-Code GPS receivers. The extended capabilities of the Tactical Series enable users to take advantage of VectorNav’s superior navigation algorithms while incorporating other technologies to enhance capabilities, security, and performance in contested environments.
Additional capabilities enabled by external IMUs and SAASM or M-Code receivers are:
- Gyrocompassing
- GPS Denied Navigation
- Anti-Jam/Anti-Spoof
- Assured PNT
.png?sfvrsn=186bdba0_1)
CONNECTING EXTERNAL DEVICES
Connecting external IMUs or SAASM/M-Code GPS receivers to the VectorNav sensor’s auxiliary port enables users to retain existing drivers and interfaces to the sensor’s main port. A simple configuration of the VectorNav sensor to accept external IMUs or GPS receivers can be done using VectorNav’s Control Center GUI. This enables users to seamlessly increase the operational performance and capabilities of their inertial solution. Please contact VectorNav support (support@vectornav.com) for information regarding cable purchase.
Download the Extended Capabilities Brochure
SAASM AND M-CODE RECEIVER SUPPORT
Applications that require precise positioning when operating in contested environments require the latest developments in modernized GPS with anti-jamming/anti-spoofing capabilities and increased security. Legacy SAASM (Selective Availability Anit-Spoofing Module) GPS receivers are being updated to M-Code receivers that feature greater anti-jamming and security. VectorNav’s Tactical Series supports any GPS/GNSS receiver that is configured to output GPS-ICD-153 protocol. Simple connection of power, ground, serial communication lines and 1PPS to the auxiliary port on the Tactical Series device will enable the sensor to utilize the external PVT data for its INS solution.
*BAE Systems and VectorNav Technologies do not have an exclusive dealing agreement.
EXTERNAL IMU SUPPORT
VectorNav Tactical Series currently supports three external IMUs. The table below provides a brief summary of their specifications.
 |  |  | |
IMU SPECIFICATIONS | KVH 1775 | EMCORE/SYSTRONDONNER SDI500 | NORTHROP GRUMMANLITEF LCI-100 |
GYRO | |||
| Range | ±490 °/s | ±1,000 °/s | ±610 °/s |
| In-Run Bias | 0.5 °/hr, 1σ | 1.0 °/hr, 1σ | 0.05 °/hr, 1σ |
| Noise Density (ARW) | 0.012 °/√hr | 0.02 °/√hr | ≤ 0.012 °/√hr |
| Scale Factor Error (Non-Linearity) | 50 ppm | 200 ppm | ≤ 100 ppm |
ACCELEROMETER | |||
| Range | ±30 g | ± 50 g | ± 20 g |
| In-Run Bias | 45 μg, 1σ | 100 μg, 1σ | ≤ 100 μg, 1σ |
| Accel Noise Density (VRW) | 102 μg/√Hz | ≤ 100 μg /√Hz | ≤ 100 μg /√Hz |
| Scale Factor Error (Non-Linearity) | 300 ppm | 200 ppm | ≤ 100 μg |
ATTITUDE PERFORMANCE | |||
| Heading (Static, Gyrocompass) | - | - | 0.35° sec-lat |
| Heading (Dynamic, INS) | 0.05°-0.1°, 1σ | 0.03°, 1σ | 0.015°, 1σ |
| Pitch/Roll (Static) | 0.5° RMS | 0.05°, 1σ | 0.02°, 1σ |
| Pitch/Roll (Dynamic, INS) | 0.015°, 1σ | 0.01°, 1σ | 0.01°, 1σ |
.png?sfvrsn=5224ff3_1)
