Educational Material
5.3 Absolute Localization
In many systems, having access to an accurate navigation solution that is tied to an absolute frame of reference is critical to the success of its operation. The use of GNSS has become the most common approach for obtaining such global information; however, systems must increasingly operate in GNSS-challenged environments. As the need for suitable alternatives to GNSS continues to rise, the development of other absolute localization techniques is an expanding area of focus. While not an exhaustive list, this section provides a high-level overview of a few alternative techniques that can be used for absolute localization in GNSS-denied scenarios.
Environmental Maps
One common theme in many absolute localization techniques is the use of distinct features in the surrounding environment. These features can be geolocated and compiled into a corresponding map. When a system passes over the mapped area, the detected features are compared with the map and used to refine the system's navigation solution.
Vision-Based Navigation
Many satellites are equipped with cameras and possess the capabilities to photograph the surface of Earth. A system equipped with a camera, and flying at sufficient altitude, can also photograph the surface of the Earth and potentially match images with those taken by satellites as seen in Figure 5.7. If the satellite image is geolocated, then the position of the vehicle can also be determined using image processing techniques. A database of satellite images can be compiled so that wide geographic areas can be mapped using satellite imagery.
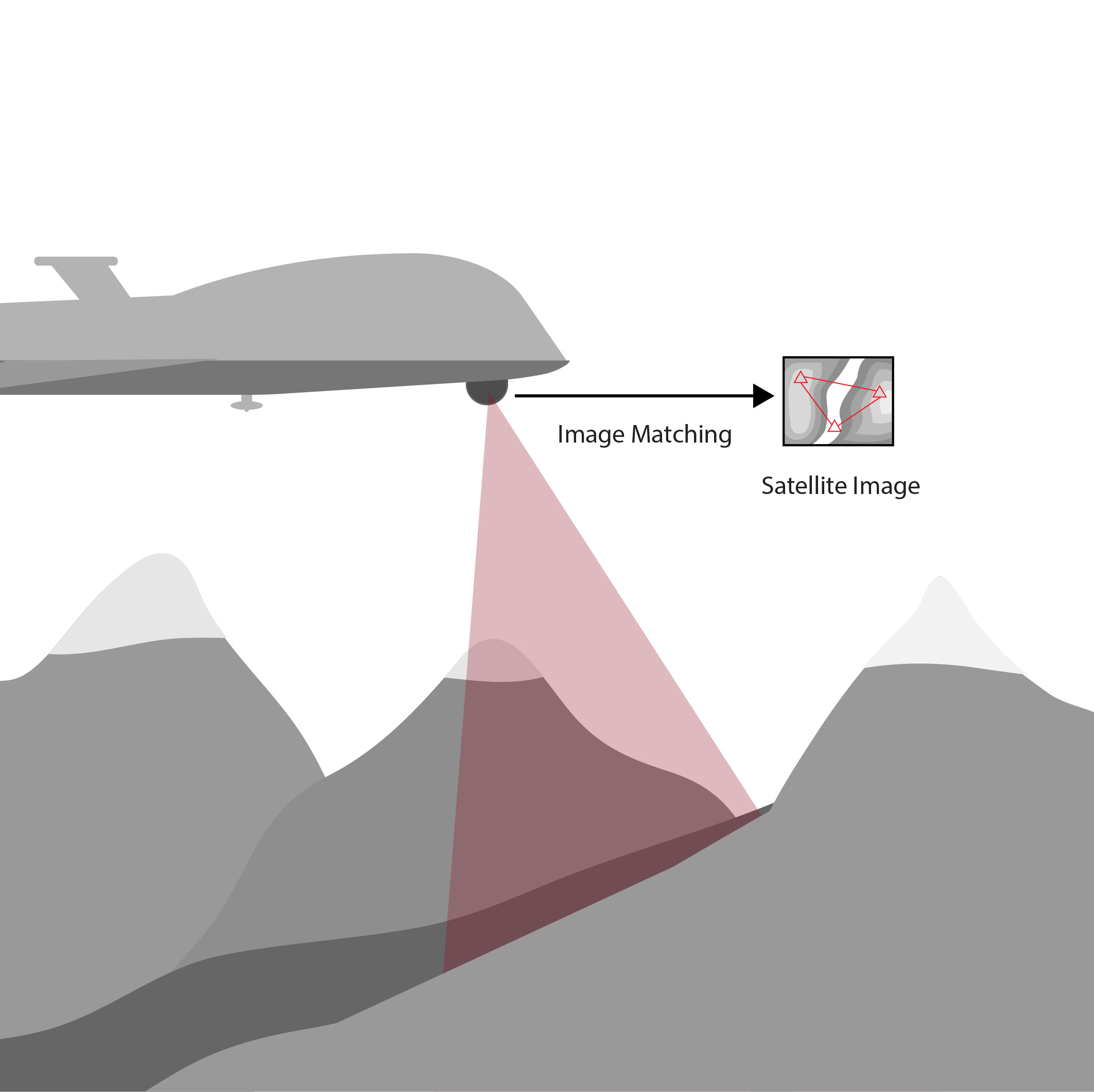
Successful image matching between satellite imagery and a real-time photographed image is sensitive to environmental conditions, such as lighting and the relative orientation of the cameras taking the image. Best results often require very similar lighting conditions and for the orientation of the cameras to be within a few degrees of each other. There must also be clear features between the two images for successful comparison, meaning vision-based navigation will not be possible when traveling over areas without unique markers, such as large bodies of water. Feature detection and tracking is also degraded in poor lighting environments and other conditions that decrease visibility, such as adverse weather. Because image matching is computationally expensive, such navigation systems require larger, more powerful processors.
LiDAR Digital Elevation Matching
A digital elevation model (DEM) is a model of Earth's surface that excludes features such as trees and buildings. These models can be produced using sensors such as a LiDAR scanner. An aerial vehicle equipped with a LiDAR scanner can scan the ground over which it flies and compare the scan with a DEM to determine if the scan matches the model of Earth's topography. Compiling a database of geolocated DEMs enables an aircraft to determine its global position in scenarios when a GNSS signal is not available.
This technique requires compiling a database of geolocated DEMs before matching can take place. Additionally, the topography must vary sufficiently in a spatial manner so that a scan can be matched to a unique DEM. Environments that are flat or vary with time, such as a beach, are not suitable for DEM matching since incorrect matches provide incorrect global position information.
Celestial Navigation
Before the creation of GNSS, navigation using the sun, moon, and stars was a common practice known as celestial navigation. The threat posed by GNSS jammers and spoofers has revived interest in celestial navigation and motivated the resurgance of terrestrial star trackers. A star tracker consists of a camera pointed at the sky and tuned to observe light from stars. The star tracker maintains a catalog of different constellations or groups of stars that, when seen, can be used to provide global feedback as shown in Figure 5.8.
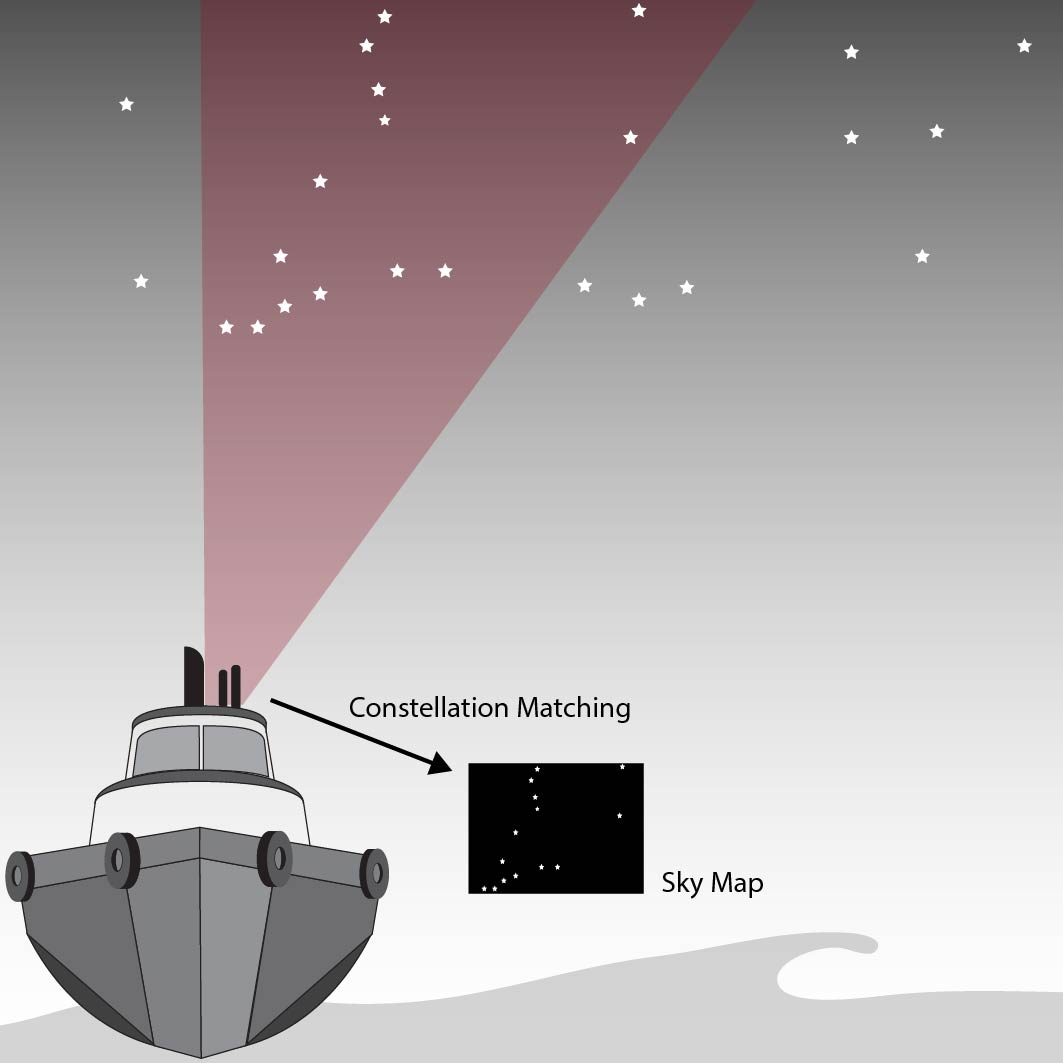
If the time, pitch, and roll of the star tracker are known, then the latitude and longitude of the star tracker can be estimated. However, the resulting position estimates are extremely sensitive to errors in the time, pitch, and roll estimates. Celestial navigation requires a clear view of the sky above the star tracker in order for constellations to be identified. Unfortunately, this technique cannot be relied upon during precipitating weather or even cloudy conditions.
Magnetic Anomaly Navigation
Researchers believe that many animals, such as salmon and sea turtles, use Earth's magnetic field to return to places they have previously traveled. It is these navigation capabilities of different animals that inspired magnetic anomaly navigation. Magnetic anomaly navigation uses the spatial deviation of Earth's magnetic crustal field, which is one part of Earth's total magnetic field. Other magnetic field components include the core magnetic field, induced fields, and magnetic disturbances due to ferrous materials and electrical currents.
Magnetic anomaly mapping seeks to isolate the crustal field using magnetic models and calibrations to remove the effects of other magnetic sources. When used with a magnetic anomaly map, which provides the expected value of Earth's crustal magnetic field, the location of the magnetometer can be estimated. Magnetic anomaly navigation is typically performed using a scalar magnetometer (rather than vector magnetic field measurements), and is sensitive to any magnetic disturbances around the magnetometer. These disturbances often bias and distort Earth's magnetic field and can be difficult to compensate for. This sensitivity to magnetic disturbances also presents challenges in generating the magnetic anomaly map of an area itself. Additional information on magnetic error sources can be found in Section 3.5.
Radio Frequency Positioning
While GNSS is the leading method of using radio frequency signals for positioning, it is not the only technology that is possible. Similar navigation approaches can be employed with other radio frequency signals, including alternative satellite-based signals as well as terrestrial-based signals.
Low-Earth Orbit (LEO) Satellite Navigation
Recently, low-earth orbit (LEO) satellite navigation has been introduced as an alternative satellite-based navigation technique to GNSS. These LEO satellites differ from GNSS satellites in that they operate much closer to the surface of Earth. Operating closer to Earth's surface means that the signals from LEO satellites have more power than a GNSS signal, allowing them to penetrate occlusions such as foliage and even be accessible indoors. This higher power also makes these signals more resistant to jamming.
Because LEO satellites were not designed explicitly for navigation, their ephemeris data and clock error information are often not publicly available. This means that a LEO receiver must also estimate the position, velocity, and clock errors of each LEO satellite in addition to its own position, velocity, and clock errors. Although a receiver capable of navigating using LEO satellites is not currently available on the commercial market, this navigation technique is an expanding area of development.
Signals of Opportunity
Aside from GNSS, many other signals exist that are widely available and can be used for navigation purposes, such as Wi-Fi, Bluetooth, and cellular signals. The principles of localization using these signals are similar to GNSS and rely on trilateration of distance measurements from the origin of the signal (e.g. the Wi-Fi router or cellular tower) and the receiver. These signals are often available in spaces where GNSS signals are not, such as indoors or in urban canyons, but each requires special hardware and software to track the signals and generate a position solution.
