RESOURCE
What is an Inertial Measurement Unit?
An Inertial Measurement Unit (IMU) is a device that typically consists of gyroscopes to measure and report angular rate and accelerometers to measure and report specific force. In this section we delve deeper into the inner workings of an inertial measurement unit to explore all the relevant specifications and information required to select the correct IMU for your application.
VN-100, VN-110What is an IMU?
An Inertial Measurement Unit (IMU) is a device that can measure and report specific gravity and angular rate of an object to which it is attached. An IMU typically consists of:
- Gyroscopes: providing a measure angular rate
- Accelerometers: providing a measure specific force/acceleration
- Magnetometers (optional): measurement of the magnetic field surrounding the system
The addition of a magnetometer and filtering algorithms to determine orientation information results in a device known as an Attitude and Heading Reference Systems (AHRS). You can learn more about how an AHRS works in Section 1.6 of the Inertial Navigation Primer.

By ArnoldReinhold - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=82248569
IMUs are available in several performance grades. They are divided into one of the four categories based on the specifications of the accelerometer and gyro:
- Consumer/Automotive Grade
- Industrial Grade
- Tactical Grade
- Navigation Grade
| GRADE | COST | GYRO IN-RUN BIAS STABILITY | GNSS-DENIED NAVIGATION TIME | APPLICATIONS |
|---|---|---|---|---|
| Consumer | <\$10 | -- | -- | Smartphones |
| Industrial | \$100-\$1000 | <10 °/hour | <1 \minute | UAVs |
| Tactical | \$5,000-\$50,000 | <1 °/hour | <10 \minute | Smart Munitions |
| Navigation | <\$100,000 | <0.1 °/hour | Several hours | Military |
VectorNav offers two grades of IMU that are based on MEMS accelerometers and gyroscopes. Below is a table the illustrates the difference between the VN-100 industrial grade device and the VN-110 tactical grade device.
VectorNav IMU/AHRS Solutions
VN-100 |
VN-110 |
|---|---|
 |
 |
Let’s dive into the specific sensors used in an IMU, namely an accelerometer and gyroscope.
ACCELEROMETER
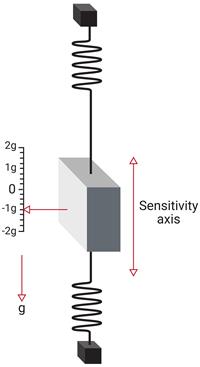
An accelerometer is the primary sensor responsible for measuring inertial acceleration, or the change in velocity over time, and can be found in a variety of different types, including mechanical accelerometers, quartz accelerometers, and MEMS accelerometers. A MEMS accelerometer is essentially a mass suspended by a spring, as illustrated in Figure 2. The mass is known as the proof mass and the direction that the mass is allowed to move is known as the sensitivity axis. When an accelerometer is subjected to a linear acceleration along the sensitivity axis, the acceleration causes the proof mass to shift to one side, with the amount of deflection proportional to the acceleration.
To learn more about the operation of a MEMS accelerometer see Section 1.3, or to understand the various specifications associated with selecting a suitable accelerometer for your application please refer to Section 3.1 of the VectorNav Inertial Navigation Primer.
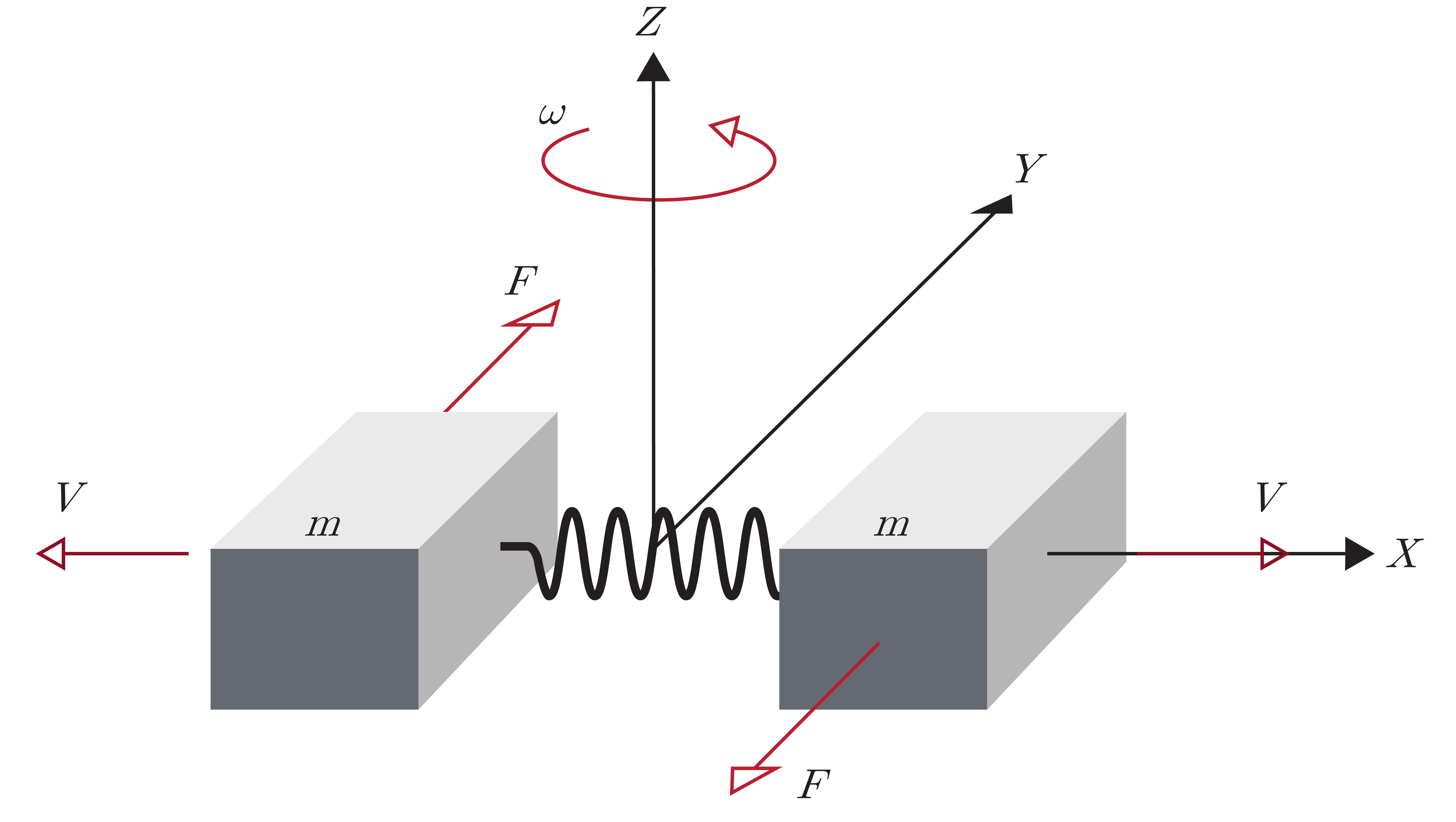
GYROSCOPE
A gyroscope is an inertial sensor that measure an object's angular rate with respect to an inertial reference frame. There are many different types of gyroscopes available on the market, which range over various levels of performance and include mechanical gyroscopes, fiber-optic gyroscopes (FOGs), ring laser gyroscopes (RLGs), and quartz/MEMS gyroscopes. Quartz and MEMS gyroscopes are typically used in the consumer grade, industrial grade, and tactical grade markets, while fiber-optic gyroscopes span all four of the performance categories. Ring laser gyroscopes typically consist of in-run bias stabilities ranging anywhere from 1 °/hour down to less than 0.001 °/hour, encompassing the tactical and navigation grades. Mechanical gyroscopes make up the highest performing gyroscopes available on the market and can reach in-run bias stabilities of less than 0.0001 °/hour.
To learn more about the operation of a MEMS gyroscope see Section 1.3, or to understand the various specifications associated with selecting a suitable accelerometer for your application please refer to Section 3.1 of the VectorNav Inertial Navigation Primer.
MAGNETOMETER
A magnetometer is a type of sensor that measures the strength and direction of a magnetic field. While there are many different types of magnetometers, most MEMS magnetometers rely on magnetoresistance to measure the surrounding magnetic field. Magnetoresistive magnetometers are made up of permalloys that change resistance due to changes in magnetic fields. Typically, MEMS magnetometers are used to measure a local magnetic field which consists of a combination of Earth's magnetic field as well as any magnetic fields created by nearby objects.

How does an Inertial Measurement Unit (IMU) work?
An individual inertial sensor can only sense a measurement along or about a single axis. To provide a three-dimensional solution, three individual inertial sensors must be mounted together into an orthogonal cluster known as a triad. This set of inertial sensors mounted in a triad is commonly referred to as a 3-axis inertial sensor, as the sensor can provide one measurement along each of the three axes. Similarly, an inertial system consisting of a 3-axis accelerometer and a 3-axis gyroscope is referred to as a 6-axis system as it provides two different measurements along each of the three axes for a total of six measurements.
An inertial measurement unit (IMU) measures and reports raw or filtered angular rate and specific force/acceleration experience by the object it is attached to.
Data outputs for an IMU are typically body-frame accelerations, angular rates and (optionally) magnetic field measurements.
The user is then responsible for determining the attitude by implementing a stand-alone fusion algorithm such as a Kalman Filter. To learn more about the Kalman filter please refer to Section 2.8 in the VectorNav Inertial Primer.